Agora que já vimos como esticar uma imagem, vamos empilhar. Melhor ainda, antes de saber como empilhar, vamos saber por que empilhar.
Quando fotografamos algo terrestre, normalmente fotometramos de forma que o histograma preencha boa parte do espectro. O sinal na maior parte do espectro é bem mais forte que o ruído. A exceção é justamente nas áreas mais escuras. Podemos perceber isso quando tentamos “puxar” detalhes na sombra, e o ruído vem junto.
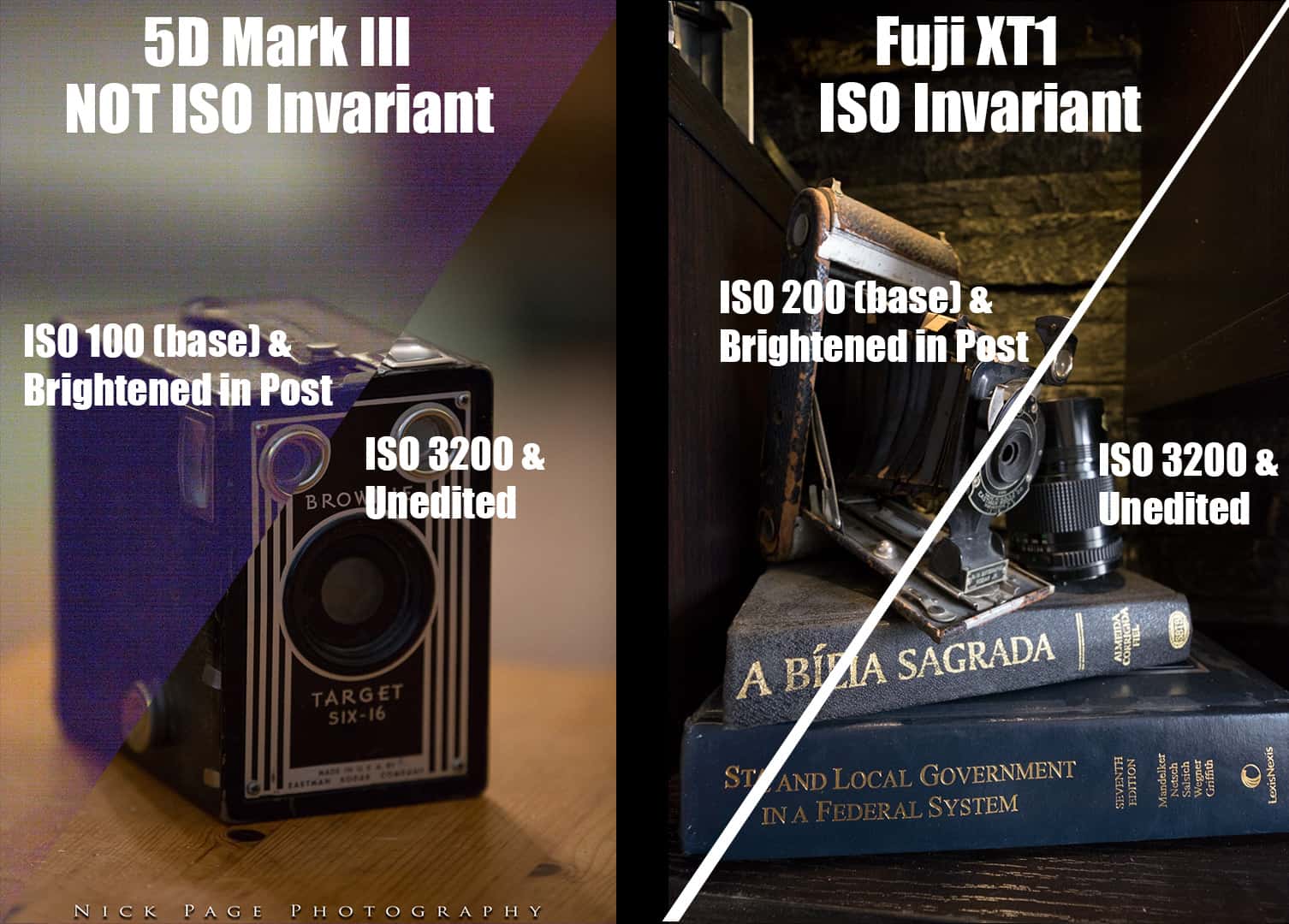
Ainda bem que sensores modernos têm tão pouco ruído nas sombras! Mas, ao se puxar as sombras, o ruído vem junto – como se fosse um ISO elevado.
Então, ao se tentar esticar uma imagem que teve pouco tempo de exposição, vamos trazer um monte de ruído:

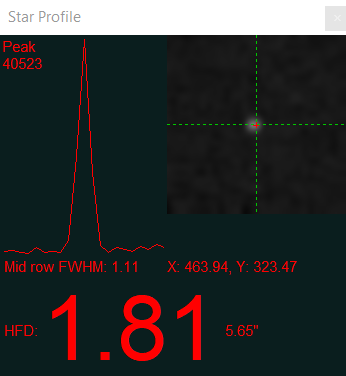
Esta imagem foi exposta por 120 segundos (2 minutos) e ainda exibe sinal bem fraco da nebulosa, em comparação com o ruído do sensor, circuitos eletrônicos e aquecimento do sensor.
O ruído é, por natureza, aleatório. O sinal, no caso de um objeto estático como um DSO (Deep Sky Object, ou Objeto de Espaço Profundo), é constante. Então, a maneira de se conseguir filtrar o ruído à esquerda do histograma (onde está nosso precioso sinal) é aumentando a relação de sinal dividido pelo ruído, ou SNR (Signal to Noise Ratio). Pode-se conseguir isto de duas formas: Ou se aumenta o sinal, expondo nossa imagem por mais tempo, ou diminuindo o ruído.
Aumentar o tempo de exposição pareceria uma simples resposta para aumentar o sinal. Porém, durante esse longo tempo de exposição, há aviões, satélites e nuvens passando na frente da câmera, que arruinariam nossa imagem. Além disso, a faixa dinâmica das astrofotos envolve objetos extremamente brilhantes, como as estrelas, e extremamente escuros, como nebulosas e galáxias. Quando se aumenta o tempo de exposição, obtém-se melhor sinal dos objetos escuros, mas os objetos brilhantes vão invariavelmente saturar os pixels do sensor, causando perda de sinal nas altas luzes. Finalmente, longos tempos de exposição demandam um rastreio das estrelas bastante preciso.
Outra forma de aumentar a relação sinal/ruído é diminuir o ruído. Pode-se fazer isto mantendo o sinal constante, usando um tempo menor de subexposição, e coletando-se várias subexposições. Como o ruído tem natureza aleatória (em grande parte, vamos discutir os outros casos em outra ocasião), quando se faz uma média entre as várias subexposições vai-se diminuir o ruído. Quanto mais subexposições, maior será esta redução.
O resultado é que, quando se empilha várias subexposições como a acima, o resultado é este (após esticamento):

Empilhamento de cerca de 400 subexposições de 2 minutos cada.
Mas como empilhar?
A primeira etapa é coletar imagens suficientes do objeto que queremos fotografar. Pode variar de poucos segundos, no caso de planetas, até várias horas, no caso de nebulosas e galáxias. Essas são nossas subexposições de luz. Mas isso não é o suficiente.
Como eu comentei lá em cima, além do sinal (que queremos), há o ruído do sensor, circuitos eletrônicos e aquecimento (que não queremos). Há também defeitos causados por imperfeições e poeira no caminho que a luz percorre até chegar no sensor. Já vimos como neutralizar o ruído do sensor, que é aumentando o tempo total de exposição, usando várias subexposições. Agora, vamos ao ruído de circuitos eletrônicos. Por sorte, este tipo de ruído, além de baixo, tem características bem definidas.
O que se faz, normalmente, é coletar várias subexposições (estão notando um padrão aqui?) que contém somente o ruído dos circuitos eletrônicos. Estas subexposições são capturadas com a menor duração de leitura do sensor possível, e com a câmera tampada, para não entrar nenhuma luz de fora. Chamaremos este ruído de viés do sensor (“bias”, em inglês). Fazemos para cada pixel uma média simples deste conjunto de subexposições de viés:
média simples=(s1+s2+s3+s4…+sN)/N, onde N é o número de subexposições e s é o valor daquele pixel.
Esta média é chamada de quadro mestre de viés (master bias frame). Vamos usá-lo daqui a pouco.
O ruído térmico também tem características bastante definidas, e é dependente da temperatura do sensor durante a coleta de luz, assim como da duração da subexposição. Na prática, coleta-se uma série de subexposições da mesma duração das subexposições de luz, na mesma temperatura, porém com a câmera tampada. Não precisa ser o mesmo número de subexposições de luz, mas precisa ter o mesmo tempo de exposição. Quando se usa uma câmera “terrestre”, a redução de ruído de longa exposição faz justamente isso: após fazer uma primeira subexposição de luz de longa duração, ela fecha o obturador e faz uma segunda subexposição escura de igual duração, e depois subtrai esta segunda da primeira.
Como este tipo de ruído é dependente da temperatura, câmeras dedicadas a astrofoto comumente possuem resfriamento do sensor, que não só diminui o ruído, mas controla a temperatura pra que as subexposições de luz e escuras sejam sempre coletadas na mesma temperatura.
Os quadros de viés vão parecer completamente escuros, mesmo quando esticados. Já os quadros de ruído térmico de alguns sensores têm característica bem definida:

Com este conjunto de subexposições escuras, também fazemos uma média simples, obtendo um quadro mestre escuro (master dark frame). Vamos usá-lo daqui a pouco também.
Outra fonte de defeito (mas não é ruído) no nosso precioso sinal é causado por vinheta do telescópio e grãos de poeira que eventualmente vão pousar no caminho ótico entre o telescópio e o sensor. Por vezes, nossas subexposições de luz saem da câmera assim:

Além da vinheta bastante observável, vemos vários pontos de poeira que causam os anéis de sombra na imagem. Pra eliminar estes defeitos, colocamos uma superfície de cor neutra (branca) sobre nossa câmera e coletamos (como vocês podem adivinhar!) um conjunto de subexposições brancas (flat frames em inglês). É importante que estas subexposições não estejam nem subexpostas (pra não perder detalhes) nem superexpostas (pra não saturar detalhes). Normalmente se procura que o pico do histograma esteja entre ¼ e ½ do histograma, da esquerda para a direita. Uma subexposição branca vai parecer mais ou menos assim:

De cada subexposição branca, subtraímos o quadro mestre de viés para obter quadros brancos calibrados. Da média destes, obtemos um quadro mestre branco. Nota: as operações mostradas aqui, subtração e divisão, estão disponíveis na maioria dos programas de edição.
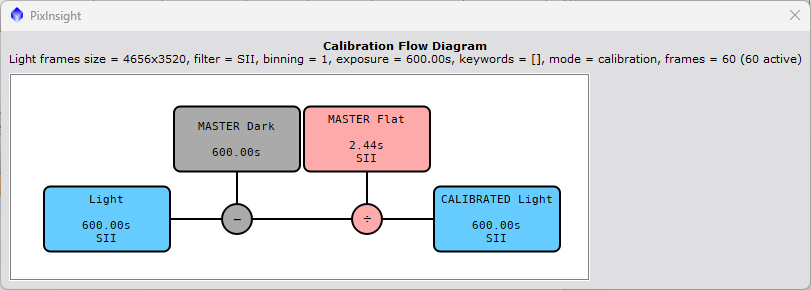
Agora finalmente vamos voltar ao nosso conjunto de subexposições de luz. O primeiro passo é subtrair cada subexposição de luz do quadro mestre escuro. O segundo passo é dividir o resultado pelo quadro mestre branco. Com isso, obtemos quadros calibrados de luz.
Quadro de luz não calibrado (simples subexposição):

Quadro de luz calibrado:

Parece complicado? Pois é complica mais.
Agora é hora de alinhar cada quadro calibrado de luz. Podemos escolher qualquer quadro de luz do conjunto como referência (cada quadro de luz é uma subexposição de luz que foi calibrada), mas normalmente os programas escolhem automaticamente qual usar: o primeiro, o último, ou o melhor de todos em termos de contraste e sinal/ruído.
Então todos os quadros calibrados de luz são alinhados em relação ao quadro de referência: cada um deles é rotacionado e movido para que as estrelas fiquem alinhadas em cada um dos quadros calibrados de luz. Cada um destes quadros é chamado de quadro registrado. O programa que vai fazer o alinhamento também coloca dados de referência de quanto o quadro foi girado e movido.
Neste ponto, note que não é necessário ter uma montagem equatorial para se conseguir empilhar imagens: basta que haja área suficiente de superposição entre cada quadro calibrado, e que as estrelas não estejam muito deformadas, de forma que o programa de empilhamento não consiga reconhecê-las. Fazendo-se a regra dos 500, é possível obter estrelas redondas o suficiente pra alinhar e empilhar. O limite aqui é o tempo de cada subexposição, que tem que ser curto. Enquanto tal técnica permite uma exposição total de alguns minutos, fica impraticável usá-la por várias horas.
Continuando, finalmente é hora de empilhar as imagens. Até agora, usamos médias simples entre cada imagem. Porém, como já citei lá em cima, há aviões e satélites riscando todo o céu. Uma imagem alinhada e empilhada por média simples pareceria algo assim:

Sim, são muitos satélites!
Ao invés disso, usa-se outros tipos de média para cálculo do valor de cada pixel: média ponderada, média ponderada com desvio padrão, etc. Na prática, quando há um valor muito fora do esperado (de novo, baseado no quadro de referência), aquele valor do pixel é desprezado. Com isso, o resultado de um empilhamento vai rejeitar tudo o que não é comum a todas as imagens:

Aceito/Rejeitado
Assim obtemos uma imagem que possui ruído baixo no lado esquerdo do histograma. Esta imagem estaria pronta para ser esticada, como discutimos no post anterior. Há vários programas usados para empilhar imagens; de opções gratuitas, como o Deep Sky Stacker (DSS) e Siril até opções pagas (e caras) como o Pixinsight.
Ufa! É o bastante pra dar uma ideia do que é empilhamento e esticamento, os princípios do processamento de astrofoto.